
音源方向推定の研究
音源方向推定の研究
| 背 景 ロボットが人から呼びかけれれた時、どこから誰に呼ばれたのか、を推定する技術は重要です。そのほかにも、テレビ会議で発言者の方向を検出してカメラでクローズアップをしたり、騒音源を調査したり、また、遠隔監視で異常音の発生位置を見つけたり、音源方向推定技術は広い用途を持っています。 原 理 音源方向推定には、 1) 信号の時間差検出に基づく方法 2) 鋭い指向性のビームを走査する方法 3) 行列を利用して空間周波数として求める方法 の3つが代表的です。 ここでは、1) の方法について説明します。 右図は、音源から到来した音波を2つのマイクロホンで受音する様子です。 音波は、最初にマイク1で受音され、少し遅れてマイク2で受音されます。 この信号の時間差 τと音源の方向θは θ = sin-1(cτ/d) c:音速 と関係づけられます。 例えば、音が図の上方向から(θ =0°) から来た場合には時間差は無く、また、音が図の右方向から来た場合には時間差は最大(d/c) となります。 よって、マイクロホンで受音された信号の時間差を検出すれば、音源方向が推定されます。 課 題 実際の音環境で音源方向推定を行う場合には、周囲の雑音(騒音)や室内の反射音などが妨害要因となって誤推定が発生します。 特に反射音は、同じ音が壁や天井から反射されて「別の方向」から到来する(図3)ので、大きな妨害要因となります。 研究内容 反射音は、上記1)から3)のいずれの方法にも悪影響をおよぼします。 当研究室ではまず、最も基本的な 1)時間差検出に基づく方法を対象として、反射音の影響を軽減する信号処理手法の開発を進めています。 現在進めている研究は ・ サブバンド・ピークホールド処理 人間の聴覚の仕組みを反映させ、先行する直接音により後続の反射音をマスク(覆い隠す)する方法です (図5)。 従来の方法より反射音の影響を受けにくいすぐれた方法であることが確認されています。 発表文献 受賞しました。 ・ 初期反射音の抑圧に基づく手法 反射音の中でも、特に初期反射音の影響が大きいということがわかったので、残響除去技術などを用いて初期反射音を除去した後、方向推定を行う方法 (図6)の検討を進めています。 発表文献 ・ 発話方向の検出 ロボットが人の声を検出したとき、その人はロボットに向かって発話したのか、それとも、他の人に向かって発話したのかを判定することは、人とロボットのコミュニケーションにおいて重要です。我々は、複数のマイクを用いて、発話方向を推定する技術の研究を進めています。 参考文献 |
 図1.声(音源)の方向を推定することは ロボット聴覚の実現の第一歩. |
|
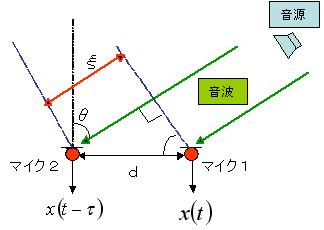 図2.音を複数のマイクロホンで受音する様子 |
||
 図3.反射音は音源とは異なる方向から到来し、 音源方向の誤推定の要因となる |
||
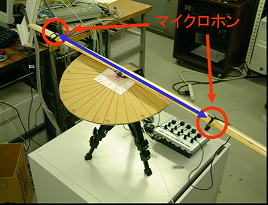 図4.受音装置 |
||
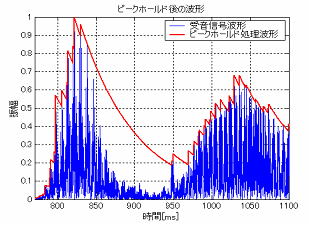 図5.ピークホールド処理の例 |
||
 図6.初期反射音抑圧を利用した方向推定の 処理ブロック図 |